
产品展示更多>>
- 介绍费斯托FESTO平行抓手结构原理 气缸

- 介绍费斯托FESTO平行抓手结构原理 气缸
介绍费斯托FESTO平行抓手结构原理
气爪技术:
气爪采用滑动轴承导轨,夹爪和壳体之间存在回转间隙。表中的回转间隙数值采用传统的累加公差方法计算而来。
所示打开和合拢时间 [ms]测量条件为:室温、工作压力6 bar 、气爪水平安装、不带附加气爪手指。用于更大负载 [g]时,气爪必须节流。
随后必须相应地调节打开和合拢时间。
夹紧力与工作压力和杠杆臂的关系可通过以下图表确定。
持续感测活塞位置。有一个模拟量输出,模拟量输出信号与活塞位置成正比。
– 可调位置传感器,用于小型气爪
– 可集成接近开关,用于中大型气爪
• 可用作双作用和单作用气爪
• 压缩弹簧用于补偿或保持夹紧力
• 适用于向内或向外抓取
所示的许用力和扭矩适用于单个夹爪。
包括杠杆臂、由工件或外部气爪手指造成的额外应用负载以及运动时产生的加速度和力。
计算扭矩时,必须考虑零点坐标系(夹爪导轨)。图片及型号:
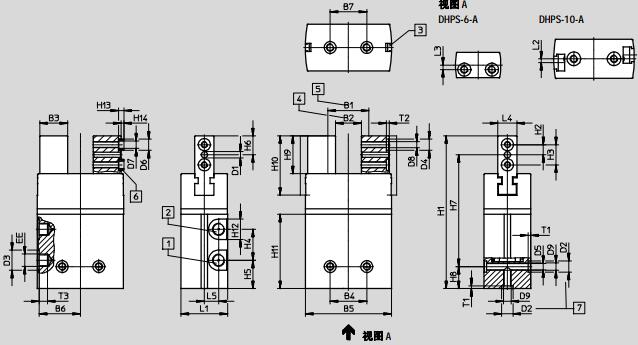

介绍费斯托FESTO平行抓手结构原理
结构形成:
导向 普通轴承导向 位置检测 用于接近式传感器 6bar时的总动力,打开 210 N 6bar时的总动力,关闭 190 N 工作压力 2 ... 8 bar 气爪的大工作频率 3 Hz 6 bar时的小打开时间 33 ms 6 bar时的小关闭时间 41 ms 工作介质 压缩空气符合ISO8573-1:2010 [7:4:4] 关于工作和先导介质的说明 可以使用经过润滑的压缩空气 (一旦使用后要求一直使用经过润滑的压缩空气)
